“This mesmerizing installation, with its precarious mixture of bouncing rubber and flying steel, is like a world financial crisis all by itself. With simple but powerful elements, CONNECT generates endless dramatic episodes of comical failure and heroic determination. The vital network of CONNECT won’t stop changing, and we can’t stop looking at it.”
Bruce Sterling, Jury Member,
SHARE PRICE 2009
NEWS
24.05.2010
CONNECT is published in the book
"Code und Material".
06.05.2010
CONNECT is nominated for the
FILE PRIX LUX, category "Digital Language". Please
vote!
09.01.2010
CONNECT wins Second Prize
VIDA 12.0 Award.
09.11.2009
CONNECT is published in the magazin
"off topic: aufräumen #1".
07.11.2009
CONNECT received
SHARE PRICE 2009.
27.05.2009
CONNECT received a Honorary Mention, category “Interactive Art” at the
Prix ARS Electronica 2009.
07.11.2008
SIMULATION
Java has to be installed on the computer to view a simulation of CONNECT. Also allow to install needed plug-ins when opening simulation. Use Firefox if Internet Explorer has problems.
>
view simulation
REALIZATION
click to enlarge
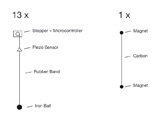

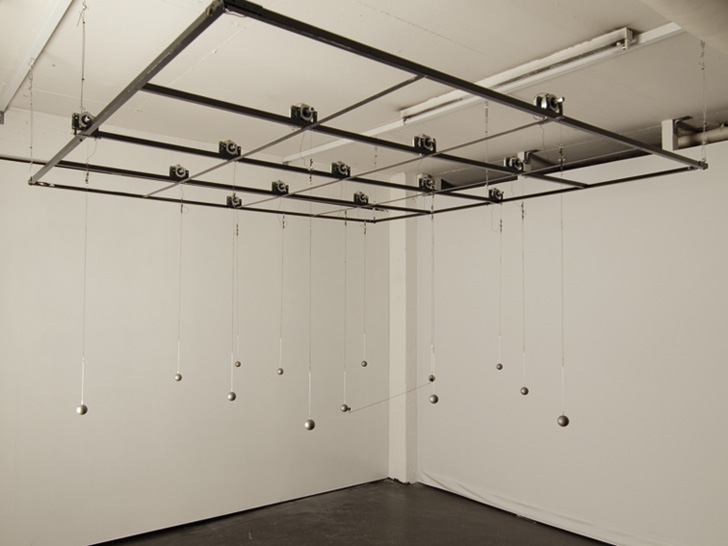
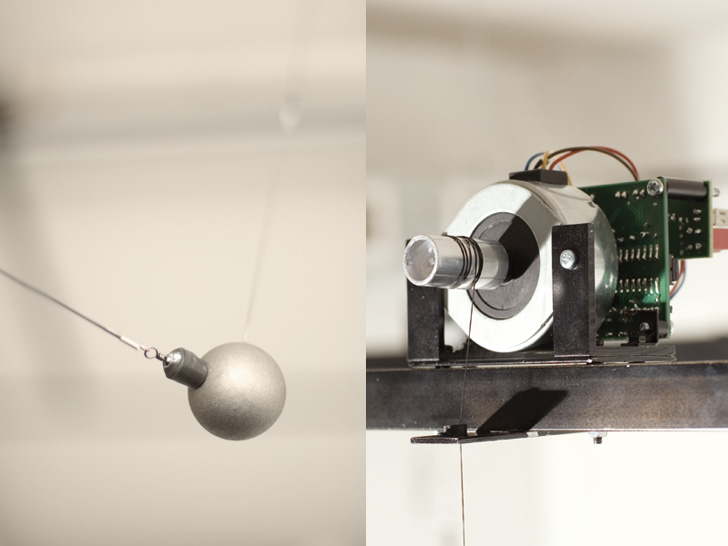
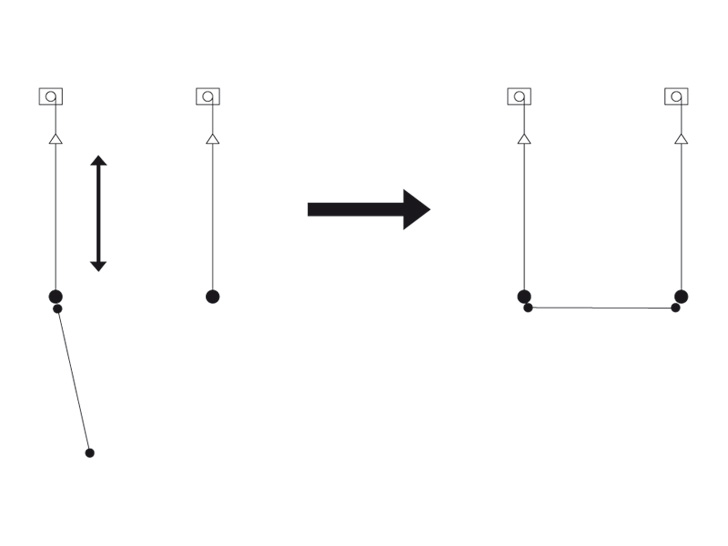
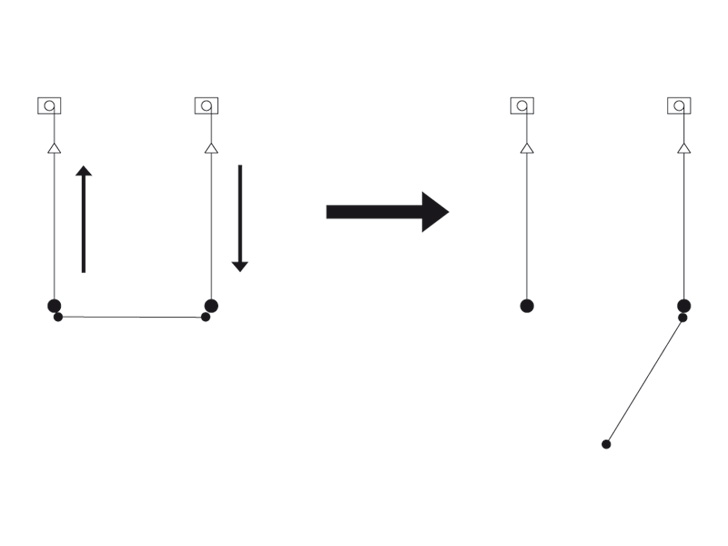
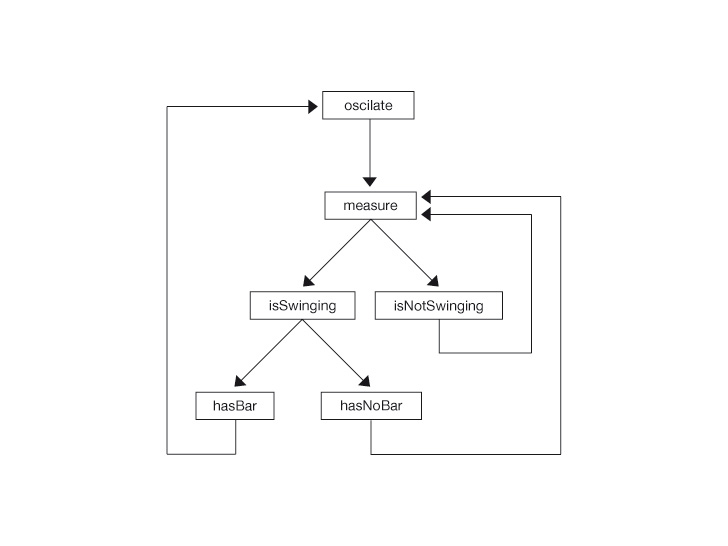
Each of the 13 modules consists of a microcontroller, a stepper motor and a sphere of steel connected to it with a rubber band. A piezo sensor is placed between motor and sphere. So each element could measure and activate its own oscillation through a simple feedback mechanism programmed on each chip. All microcontrollers are based on the physical computing plattform
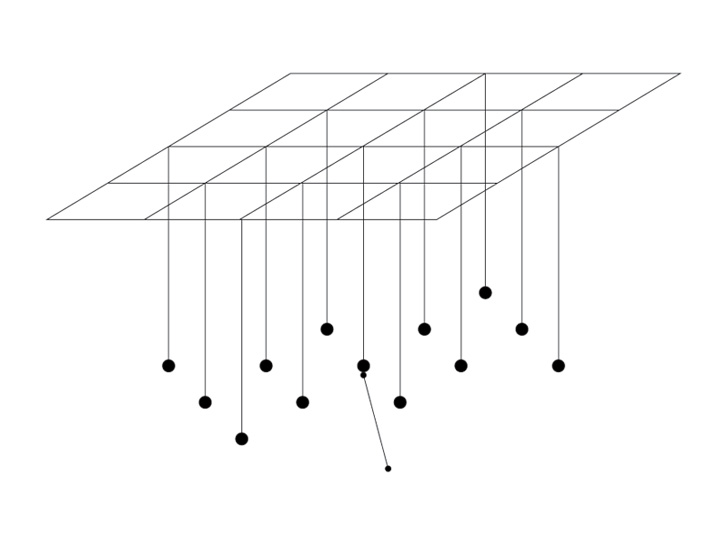
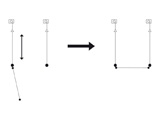
arduino and are custom built for CONNECT. The physical impulse carrier consists of a carbonbar and two magnets. Through the use of its magnetism it has the ability to connect to an element. If attached it behaves like a double pendulum with chaotic motion. There is one simple rule: If the impulse carrier
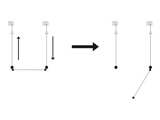
is attached to an element, the stepper starts swinging, as long, as the carrier gets detached by a simple analogue mechanism to another element. If both connected elements start swinging in a disharmonic way, one connection
will break because of the forces generated by this coupled spring mechanism. If a module is detached it stops activating its own oscillation. Therefore the physical impulse carrier controls the motion behaviour of the whole sculpture. There is no main program outside of the sculpture and no digital connection between the elements. Each module has its own simple program logic and they just start to react to each other because of the physical connections built.
TECHNICAL AND SPATIAL REQUIREMENTS
click to enlarge
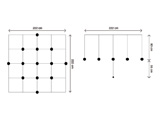
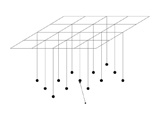
To install CONNECT a minimum space of 4.5 x 4.5 meters is needed. The mounting grid, which is already included in the work, must be attached to the ceiling of the exhibition area with six steel ropes (also included with the work). This ceiling should be minimum 2,5 meter. If the the ceiling is higher than 3,5 meters a stable traverse must be provided, because otherwise the mounting grid starts swinging too much.
CREDITS
Martina Höfflin, Georg Trogemann, Frans Vogelaar, Christiane König (support theory)
Martin Nawrath (support hardware/software microcontroller)
Heinz Nink, Bernd Voss, Peter Schuster (technical support)
Martin Hesselmeier (images)
Oswin Schmidt (video)
Michael Pichler (layout thesis)
Many thanks to all the people of
Lab3 for general support
and to
Andreas Neumann GmbH for sponsoring the excellent rubbers.